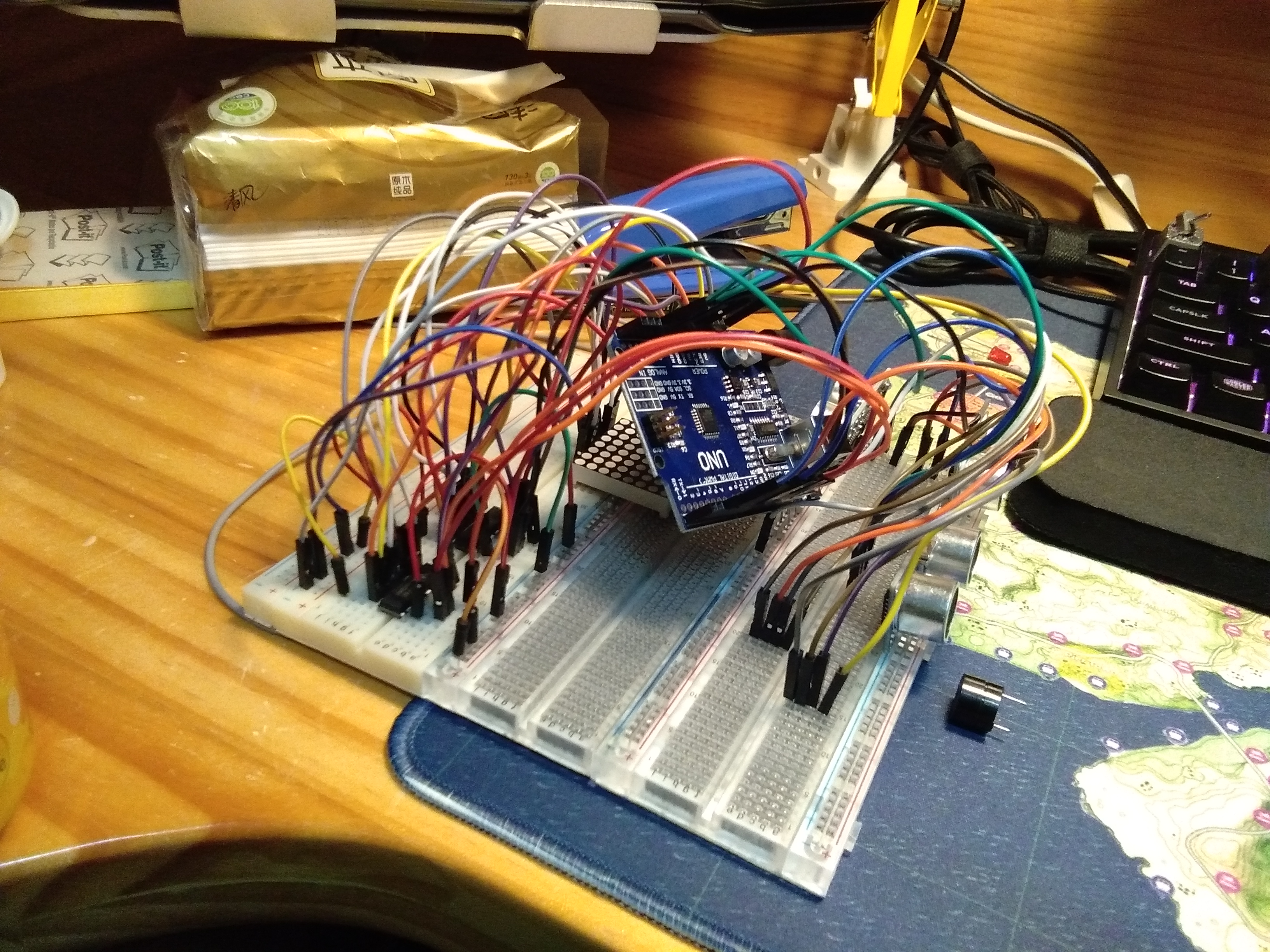
Here is our code.
const int echopin=A0; // echo接5端口
const int trigpin=4; // trig接4端口 左侧超声波测距器
const int echopin2=A1;
const int trigpin2=2;// 右侧超声波测距器
const int echopin3=A2;
const int trigpin3=7;// 前方超声波测距器
float F,R,L ;
int ColDataInput = 8;
int ColConfirm = 9;
int ColData = 10;
int RowDataInput = 11;
int RowConfirm = 12;
int RowData = 13;
void setup()
{
Serial.begin(9600);
pinMode(echopin,INPUT); //设定echo为输入模式
pinMode(trigpin,OUTPUT);//设定trig为输出模式
pinMode(echopin2,INPUT);
pinMode(trigpin2,OUTPUT);
pinMode(echopin3,INPUT);
pinMode(trigpin3,OUTPUT);
pinMode(8,OUTPUT);
pinMode(9,OUTPUT);
pinMode(10,OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
}
void ConfirmRowDataInput()
{
digitalWrite(RowDataInput, HIGH);
digitalWrite(RowDataInput, LOW);
}
void ConfirmRowDataAll()
{
digitalWrite(RowConfirm, HIGH);
digitalWrite(RowConfirm, LOW);
}
void ConfirmColDataInput()
{
digitalWrite(ColDataInput, HIGH);
digitalWrite(ColDataInput, LOW);
}
void ConfirmColDataAll()
{
digitalWrite(ColConfirm, HIGH);
digitalWrite(ColConfirm, LOW);
}
void SelectRow(int ID)
{
for (int i = 1; i <= 8; i++)
{
if (i == ID)
{
digitalWrite(RowData, LOW);
}
else
{
digitalWrite(RowData, HIGH);
}
ConfirmRowDataInput();
}
ConfirmRowDataAll();
}
void SelectCol(char Data[8])
{
for (int i = 0; i < 8; i++)
{
if (Data[i] == '0')
digitalWrite(ColData, LOW);
else
digitalWrite(ColData, HIGH);
ConfirmColDataInput();
}
ConfirmColDataAll();
}
void ClearAll()
{
for (int i = 1; i <= 8; i++)
{
digitalWrite(RowData, HIGH);
ConfirmRowDataInput();
}
ConfirmRowDataAll();
for (int i = 1; i <= 8; i++)
{
digitalWrite(ColData, LOW);
ConfirmColDataInput();
}
ConfirmColDataAll();
}
void turnLeft()
{
ClearAll();
SelectRow(1);
SelectCol("00010000");
delay(1);
ClearAll();
SelectRow(2);
SelectCol("00110000");
delay(1);
ClearAll();
SelectRow(3);
SelectCol("01011111");
delay(1);
ClearAll();
SelectRow(4);
SelectCol("10000001");
delay(1);
ClearAll();
SelectRow(5);
SelectCol("10000001");
delay(1);
ClearAll();
SelectRow(6);
SelectCol("01011111");
delay(1);
ClearAll();
SelectRow(7);
SelectCol("00110000");
delay(1);
ClearAll();
SelectRow(8);
SelectCol("00010000");
delay(1);
}
void turnRight()
{
ClearAll();
SelectRow(1);
SelectCol("00001000");
delay(1);
ClearAll();
SelectRow(2);
SelectCol("00001100");
delay(1);
ClearAll();
SelectRow(3);
SelectCol("11111010");
delay(1);
ClearAll();
SelectRow(4);
SelectCol("10000001");
delay(1);
ClearAll();
SelectRow(5);
SelectCol("10000001");
delay(1);
ClearAll();
SelectRow(6);
SelectCol("11111010");
delay(1);
ClearAll();
SelectRow(7);
SelectCol("00001100");
delay(1);
ClearAll();
SelectRow(8);
SelectCol("00001000");
delay(1);
}
void nowhere()
{
ClearAll();
SelectRow(1);
SelectCol("10000001");
delay(1);
ClearAll();
SelectRow(2);
SelectCol("01000010");
delay(1);
ClearAll();
SelectRow(3);
SelectCol("00100100");
delay(1);
ClearAll();
SelectRow(4);
SelectCol("00011000");
delay(1);
ClearAll();
SelectRow(5);
SelectCol("00011000");
delay(1);
ClearAll();
SelectRow(6);
SelectCol("00100100");
delay(1);
ClearAll();
SelectRow(7);
SelectCol("01000010");
delay(1);
ClearAll();
SelectRow(8);
SelectCol("10000001");
delay(1);
}
void everywhere()
{
ClearAll();
SelectRow(1);
SelectCol("11100111");
delay(1);
ClearAll();
SelectRow(2);
SelectCol("10100101");
delay(1);
ClearAll();
SelectRow(3);
SelectCol("11100111");
delay(1);
ClearAll();
SelectRow(4);
SelectCol("00000000");
delay(1);
ClearAll();
SelectRow(5);
SelectCol("00000000");
delay(1);
ClearAll();
SelectRow(6);
SelectCol("10000001");
delay(1);
ClearAll();
SelectRow(7);
SelectCol("01000010");
delay(1);
ClearAll();
SelectRow(8);
SelectCol("00111100");
delay(1);
}
void loop()
{
// *********************************** 左方测距******/
digitalWrite(trigpin,LOW);
delayMicroseconds(2);
digitalWrite(trigpin,HIGH);
delayMicroseconds(10);
digitalWrite(trigpin,LOW); //发一个10ms的高脉冲去触发TrigPin
float distanceL = pulseIn(echopin,HIGH);//接收高电平时间
distanceL = distanceL/58.0;//计算距离
if (distanceL > 400)
{
distanceL = L;
}
else{
L = distanceL;
}
Serial.println(distanceL);
/*******************右方测距******************************************/
digitalWrite(trigpin2,LOW);
delayMicroseconds(2);
digitalWrite(trigpin2,HIGH);
delayMicroseconds(10);
digitalWrite(trigpin2,LOW); //发一个10ms的高脉冲去触发TrigPin
float distanceR = pulseIn(echopin2,HIGH);//接收高电平时间
distanceR = distanceR/58.0;//计算距离
if (distanceR > 400)
{
distanceR = R;
}
else{
R = distanceR;
}
Serial.println(distanceR);
// *******************前方测距********************************************/
digitalWrite(trigpin3,LOW);
delayMicroseconds(2);
digitalWrite(trigpin3,HIGH);
delayMicroseconds(10);
digitalWrite(trigpin3,LOW); //发一个10ms的高脉冲去触发TrigPin
float distanceF = pulseIn(echopin3,HIGH);//接收高电平时间
distanceF = distanceF/58.0;//计算距离
if (distanceF > 400)
{
distanceF = F;
}
else{
F = distanceF;
}
Serial.println(distanceF);
if (distanceF <=50){
if (distanceL>distanceR){
if(distanceL<40){
for (int i = 0 ; i < 200 ; i++)
{
nowhere();
}
}else{
for (int i = 0 ; i < 200 ; i++)
{
turnLeft();
}
}
}else{
if(distanceR<40){
for (int i = 0 ; i < 200 ; i++)
{
nowhere();
}
}else{
for (int i = 0 ; i < 200 ; i++)
{
turnRight();
}
}
}
}
else{
for (int i = 0 ; i < 200 ; i++)
{
everywhere();
}
}
ClearAll();
delay(100);
}
And this is the outside of our "hat".
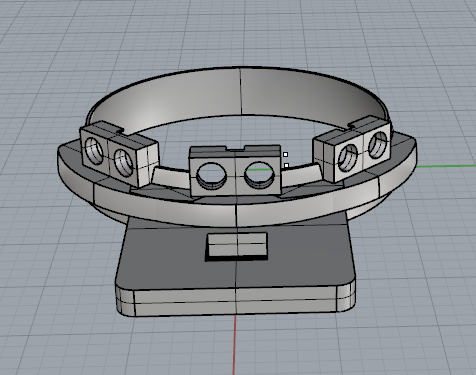
We've printed the shell of our product. And make it be useful.